A teoria da relatividade afirma que observadores em movimento relativo concordam quanto à forma das equações que descrevem os fenômenos observados. é necessário então descobrir a lei de transformação que leva à descrição feita em um referencial para o outro. Matematicamente esta é uma transformação particular de coordenadas, que passamos a explorar.
Suponhamos que dois observadores em movimento relativo analisam um pulso de luz. Cada observador está em repouso nos referenciais \(S\) e \(S^{\prime}\) com origens respectivamente em \(O\) e \(O^{\prime} . \hspace{0.75em} S^{\prime}\) se move com velocidade \(v\) no direção do eixo \(Ox\) em relação a \(S\). Como a velocidade da luz é a mesma em todos os referenciais inerciais, o que foi demonstrado pelo experimento de Michelson-Morley, os observadores devem ver o pulso de luz se afastando de forma esférica. Se isto não fosse verdade um dos observadores seria capaz de determinar seu movimento relativo em relação ao outro, o que contradiz o princípio da relatividade. Consideremos ainda dois eventos infinitesimalmente próximos ligados por este raio de luz. Para os observadores em \(S\) e \(S^{\prime}\) estes eventos estarão separados por \(ds^{\prime}\) e \(ds^{\prime,}\) respectivamente dados por
$$
ds^2 = – dt^2 + dx^2 + dy^2 + dz^2,
$$
$$
ds^{\prime 2} = – dt^{\prime 2} + dx^{\prime 2} + dy^{\prime 2} +
dz^{\prime 2} .
$$
(5) Na verdade esta conclusão é uma inferência. Experimentalmente não é possível
observar o movimento de uma partícula em um ambiente totalmente livre de campos de força.
(6) Transformação lineares levam retas em retas.
Devido à invariância da velocidade da luz estas separação deverão ser iguais, \(ds^{\prime 2} = ds^2\). Observamos que a transformação de Galileu não deixa invariante uma frente de onda de luz que satisfaz, no referencial em repouso com relação à fonte, a equação \(x^2 + y^2 + z^2 = c^2 t^2\). Sabemos da observação(5) que partículas livres seguem trajetórias que são linhas retas e isto deve ser preservado em qualquer referencial inercial. Procuramos então uma transformação linear(6) na forma de
$$
\begin{array}{cl}
x^{\prime} & = \alpha x + \mu t\\
y^{\prime} & = y\\
z^{\prime} & = z\\
t^{\prime} & = \lambda x + \delta t,
\end{array}
$$
onde \(\alpha, \hspace{0.75em} \beta, \hspace{0.75em} \gamma \hspace{0.75em} \text{e} \hspace{0.75em} \delta \hspace{0.75em} \) são constantes a determinar. Sem perda de generalidade podemos colocar o observador fixo na origem de \(S^{\prime}\) e, portanto, sua coordenada \(x^{\prime} = 0\) enquanto \(x\) será sua coordenada do ponto de vista do observador em \(S\). Como consequência
$$
x^{\prime} = \alpha x + \mu t = 0 \Rightarrow \frac{x}{t} = v = –
\frac{\mu}{\alpha} .
$$
Já um observador fixo na origem de \(S\) \(\left( x = 0 \right)\) terá em \( S^{\prime} \) as coordenadas
$$
x^{\prime} = – \alpha vt ; \hspace{0.75em} t^{\prime} = \delta t.
$$
O referencial \(S\) se afasta de \(S^{\prime}\) com velocidade \(– v\) e
$$
\frac{x^{\prime}}{t^{\prime}} = – v = – \frac{\alpha}{\delta} v
$$
e, portanto \(\alpha = \delta\). Resta descobrir \(\alpha\) e \(\gamma\) na transformação
$$
\begin{array}{cl}
x^{\prime} & = \alpha \left( x – vt \right)\\
t^{\prime} & = \lambda x + \alpha t.
\end{array}
$$
Para o observador em \(S^{\prime}\) a frente de onda será vista como
$$
x^{\prime 2} + y^{\prime 2} + z^{\prime 2} = c^2 t^{\prime 2} \Rightarrow
\alpha^2 \left( x – vt \right)^2 + y^2 + z^2 = c^2 \left( \lambda x +
\alpha t \right)^2 \Rightarrow
$$
$$
x^2 \left( \alpha^2 – \lambda^2 c^2 \right) + y^2 + z^2 – 2 xt \left(
\alpha^2 v + c^2 \alpha \lambda \right) = c^2 t^2 \left( \alpha^2 –
\alpha^2 v^2 / c^2 \right) .
$$
Para igualarmos esta expressão à \(x^2 + y^2 + z^2 = c^2 t^2\) devemos ter
$$
\alpha^2 – \lambda^2 c^2 = 1 ; \hspace{0.75em} \hspace{0.75em}
\hspace{0.75em} \hspace{0.75em} \alpha^2 – \alpha^2 v^2 / c^2 ;
\hspace{0.75em} \hspace{0.75em} \hspace{0.75em} \hspace{0.75em} \alpha^2 v
+ c^2 \alpha \lambda = 0,
$$
cuja solução é
$$
\alpha = \frac{1}{\sqrt{1 – \left( v / c \right)^2}}, \hspace{0.75em}
\hspace{0.75em} \hspace{0.75em} \hspace{0.75em} \lambda = \frac{- v /
c^2}{\sqrt{1 – \left( v / c \right)^2}} .
$$
As transformações de coordenadas que deixam invariante a frente de onda luminosa são as chamadas transformações de Lorentz e são dadas por
(5)
$$
x^{\prime} = \frac{x – vt}{\sqrt{1 – \left( v / c \right)^2}},
\hspace{0.75em} \hspace{0.75em} \hspace{0.75em} \hspace{0.75em}
\hspace{0.75em} \hspace{0.75em} \hspace{0.75em} \hspace{0.75em}
\hspace{0.75em} \hspace{0.75em} \hspace{0.75em} y^{\prime} = y
$$
$$
t^{\prime} = \frac{t – vx / c^2}{\sqrt{1 – \left( v / c \right)^2}},
\hspace{0.75em} \hspace{0.75em} \hspace{0.75em} \hspace{0.75em}
\hspace{0.75em} \hspace{0.75em} \hspace{0.75em} \hspace{0.75em}
\hspace{0.75em} \hspace{0.75em} \hspace{0.75em} \hspace{0.75em} z^{\prime} =
z. \label{TransfLorentz}
$$
As transformações inversas, para se transformar a descrição do referencial \(S^{\prime}\) para \(S\) , pode ser obtida simplesmente lembrando que \(S\) se move com velocidade \(– v\) em relação a \(S^{\prime}\). Portanto
$$
x = \frac{x^{\prime} + vt^{\prime}}{\sqrt{1 – \left( v / c \right)^2}},
\hspace{0.75em} \hspace{0.75em} \hspace{0.75em} \hspace{0.75em}
\hspace{0.75em} \hspace{0.75em} \hspace{0.75em} \hspace{0.75em}
\hspace{0.75em} \hspace{0.75em} \hspace{0.75em} y = y^{\prime}
$$
$$
t = \frac{t^{\prime} + vx^{\prime} / c^2}{\sqrt{1 – \left( v / c
\right)^2}}, \hspace{0.75em} \hspace{0.75em} \hspace{0.75em}
\hspace{0.75em} \hspace{0.75em} \hspace{0.75em} \hspace{0.75em}
\hspace{0.75em} \hspace{0.75em} \hspace{0.75em} \hspace{0.75em}
\hspace{0.75em} z = z^{\prime} .
$$
Revisando a contração espacial e dilatação temporal
Uma vez obtidas as transformações de Lorentz os efeitos da contração espacial e dilatação \ temporal se tornam mais fáceis de serem verificados. Suponha por exemplo, que queremos medir o comprimento de uma régua que tem uma ponta em \(x_1\) e a outra em \(x_2\). No referencial de repouso seu comprimento será
$$
L_0 = x_2 – x_1 .
$$
Para um observador em movimento, com velocidade \(v\) ao longo do comprimento da régua, seu comprimento será
$$
L = x_2^{\prime} \left( t^{\prime} \right) – x_1^{\prime} \left( t^{\prime}
\right) .
$$
Observe que as medidas de cada ponto devem ser feitas no mesmo instante, \(t^{\prime}\). De acordo com a transformação de Lorentz temos
$$
x^{\prime} = \gamma \left( x – vt \right) \Rightarrow x = \gamma \left(
x^{\prime} + vt^{\prime} \right)
$$
e, portanto,
$$
\begin{array}{cl}
x_2 = & \gamma \left( x_2^{\prime} + vt^{\prime} \right)\\
x_1 = & \gamma \left( x_1^{\prime} + vt^{\prime} \right)
\end{array} .
$$
Dai podemos concluir que o observador em movimento mede um comprimento \(L\) para a régua menor que o medido no referencial de repouso:
$$
L_0 = x_2 – x_1 = \gamma \left( x_2^{\prime} – x_1^{\prime} \right) =
\gamma L.
$$
Invariância da equação de onda
Um exercício interessante pode ser feito para mostrar que a equação a equação de onda para a luz é invariante sob a transformação de Lorentz. Das equações de Maxwell se pode deduzir que a luz obedece a equação
$$
\left[ \frac{\partial^2}{\partial x^2} + \frac{\partial^2}{\partial y^2} +
\frac{\partial^2}{\partial z^2} – \frac{1}{c^2} \frac{\partial^2}{\partial
t^2} \right] \Phi \left( x, y, z, t \right) = 0,
$$
que é a equação de onda se propagando com velocidade \(c\). Em um referencial em movimento \(S^{\prime}\) teremos
$$
\left[ \frac{\partial^2}{\partial x^{\prime 2}} +
\frac{\partial^2}{\partial y^{\prime 2}} + \frac{\partial^2}{\partial
z^{\prime 2}} – \frac{1}{c^2} \frac{\partial^2}{\partial t^{\prime 2}}
\right] \Phi \left( x^{\prime}, y^{\prime}, z^{\prime}, t^{\prime} \right)
= 0
$$
sendo que \(\Phi\) é um escalar, satisfazendo portanto \(\Phi \left( x, y, z, t \right) = \Phi \left( x^{\prime}, y^{\prime}, z^{\prime}, t^{\prime} \right)\). Para simplificar as operações vamos considerar o caso de uma onda plana, com propagação na direção de \(x\) apenas, descrita por \(\Phi \left(x, t \right)\). Para relacionar as derivadas temos
$$
x^{\prime} = \gamma \left( x – vt \right) ; \hspace{0.75em} \hspace{0.75em}
\hspace{0.75em} \hspace{0.75em} t^{\prime} = \gamma \left( t – vx / c^2
\right),
$$
e, portanto, as derivadas espaciais e temporal em termos das novas
variáveis:
$$
\frac{\partial \Phi}{\partial x} = \frac{\partial \Phi}{\partial
x^{\prime}} \frac{\partial x^{\prime}}{\partial x} + \frac{\partial
\Phi}{\partial t^{\prime}} \frac{\partial t^{\prime}}{\partial x} = \gamma
\frac{\partial \Phi}{\partial x^{\prime}} – \frac{\gamma v}{c^2}
\frac{\partial \Phi}{\partial t^{\prime}},
$$
$$
\frac{\partial \Phi}{\partial t} = \frac{\partial \Phi}{\partial
x^{\prime}} \frac{\partial x^{\prime}}{\partial t} + \frac{\partial
\Phi}{\partial t^{\prime}} \frac{\partial t^{\prime}}{\partial t} = –
\gamma v \frac{\partial \Phi}{\partial x^{\prime}} + \gamma \frac{\partial
\Phi}{\partial t^{\prime}} .
$$
Os operadores derivadas se relacionam, nos dois sistemas de coordenadas, da seguinte forma:
$$
\frac{\partial}{\partial x} = \gamma \frac{\partial}{\partial x^{\prime}} –
\frac{\gamma v}{c^2} \frac{\partial}{\partial t^{\prime}} ;
\hspace{0.75em} \hspace{0.75em} \hspace{0.75em} \frac{\partial}{\partial t}
= – \gamma v \frac{\partial}{\partial x^{\prime}} + \gamma
\frac{\partial}{\partial t^{\prime}} .
$$
Podemos construir a regra de transformação para as derivadas segundas,
$$
\frac{\partial^2}{\partial x^2} = \frac{\partial}{\partial x} \left(
\frac{\partial}{\partial x} \right) = \left( \gamma
\frac{\partial}{\partial x^{\prime}} – \gamma \frac{v}{c^2}
\frac{\partial}{\partial t^{\prime}} \right) \left( \gamma
\frac{\partial}{\partial x^{\prime}} – \gamma \frac{v}{c^2}
\frac{\partial}{\partial t^{\prime}} \right) =
$$
$$
= \gamma^2 \left( \frac{\partial^2}{\partial x^{\prime 2}} – \frac{2
v}{c^2} \frac{\partial^2}{\partial x^{\prime} \partial t^{\prime}} +
\frac{v^2}{c^4} \frac{\partial^2}{\partial t^{\prime 2}} \right) ;
$$
$$
\frac{\partial^2}{\partial t^2} = \frac{\partial}{\partial t} \left(
\frac{\partial}{\partial t} \right) = \left( – \gamma v
\frac{\partial}{\partial x^{\prime}} + \gamma \frac{\partial}{\partial
t^{\prime}} \right) \left( – \gamma v \frac{\partial}{\partial x^{\prime}}
+ \gamma \frac{\partial}{\partial t^{\prime}} \right) =
$$
$$
= \gamma^2 \left( v^2 \frac{\partial^2}{\partial x^{\prime 2}} – 2 v
\frac{\partial^2}{\partial x^{\prime} \partial t^{\prime}} +
\frac{\partial^2}{\partial t^{\prime 2}} \right) .
$$
Escrevendo a equação de onda no referencial em movimento temos
$$
\left[ \frac{\partial^2}{\partial x^2} – \frac{1}{c^2}
\frac{\partial^2}{\partial t^2} \right] \Phi = 0 \Rightarrow
$$
$$
\gamma^2 \left[ \frac{\partial^2 \Phi}{\partial x^{\prime 2}} \left( 1 –
\frac{v^2}{c^2} \right) – \frac{1}{c^2} \frac{\partial^2 \Phi}{\partial
t^{\prime 2}} \left( 1 – \frac{v^2}{c^2} \right) \right] = 0,
$$
ou, simplesmente,
$$
\frac{\partial^2 \Phi}{\partial x^{\prime 2}} – \frac{1}{c^2}
\frac{\partial^2 \Phi}{\partial t^{\prime 2}} = 0,
$$
o que mostra a invariância da equação de onda sob transformações de Lorentz. De fato se pode mostrar que as equações de Maxwell são invariantes sob estas transformações. Lorentz deduziu corretamente a formas destas transformações à partir das equações do eletromagnetismo, mas não foi capaz de aplicá-las ao uso da mecânica, como fez Einstein.
Transformação de velocidades
A partir das transformações de Lorentz
$$
x^{\prime} = \gamma \left( x – vt \right), \hspace{0.75em} \hspace{0.75em}
\hspace{0.75em} \hspace{0.75em} y^{\prime} = y, \hspace{0.75em}
\hspace{0.75em} \hspace{0.75em} \hspace{0.75em} z^{\prime} = z,
\hspace{0.75em} \hspace{0.75em} \hspace{0.75em} \hspace{0.75em} t^{\prime}
= \gamma \left( t – vx / c^2 \right),
$$
podemos obter uma expressão para a relação entre velocidades nos dois referenciais inerciais. Denotamos por
$$
u_x = dx / dt \text{e} \hspace{0.75em} \hspace{0.75em} \hspace{0.75em}
u_x^{\prime} = dx^{\prime} / dt^{\prime}
$$
as velocidades em \(S\) e \(S^{\prime}\) respectivamente e calculamos as diferenciais
$$
dx^{\prime} = \gamma \left( dx – vdt \right), \hspace{0.75em}
\hspace{0.75em} \hspace{0.75em} \hspace{0.75em} dy^{\prime} = dy,
\hspace{0.75em} \hspace{0.75em} \hspace{0.75em} \hspace{0.75em} dz^{\prime}
= dz, \hspace{0.75em} \hspace{0.75em} \hspace{0.75em} \hspace{0.75em}
dt^{\prime} = \gamma \left( dt – v / c^2 dx \right) .
$$
O componente em \(x\) da velocidade é
$$
u_x^{\prime} = \frac{dx^{\prime}}{dt^{\prime}} = \frac{dx – vdt}{dt – v /
c^2 dx} = \frac{u_x – v}{1 – v / c^2 u_x} .
$$
Na última igualdade dividimos numerador e denominador por \(dt\). Da mesma forma podemos encontrar o componente \(y\) ,
$$
u_y^{\prime} = \frac{dy^{\prime}}{dt^{\prime}} = \frac{dy}{\gamma \left( dt
– v / c^2 dx \right)} = \frac{u_y}{\gamma \left( 1 – v / c^2 u_x \right)},
$$
e o componente \(z\) ,
$$
u_z^{\prime} = \frac{dz^{\prime}}{dt^{\prime}} = \frac{dz}{\gamma \left( dt
– v / c^2 dx \right)} = \frac{u_z}{\gamma \left( 1 – v / c^2 u_x \right)} .
$$
Isto mostra que os vetores velocidades não se somam da mesma forma que na mecânica de Newton.
Exemplo: Uma partícula A se move com velocidade \(v_A = 0, 5 c\) no referencial do laboratório, e emite uma partícula B com velocidade \(v_B = 0, 5 c\) em relação à sua própria velocidade. Qual a velocidade \(W\) da partícula B no laboratório? O laboratorio tem velocidade \(– v_A\) em relação a partícula:
$$
W = \frac{v_A + v_B}{1 + v_A v_B / c^2} = \frac{c}{1 + \left( 0, 5
\right)^2} = 0, 8 c.
$$
Tempo Próprio
Vimos que as medidas do tempo variam com a velocidade do observador que analisa o fenômeno sob consideração. O tempo próprio \(\tau\) de uma partícula é definido como o tempo medido por um observador que se move junto com a partícula, no chamado referencial comóvel. Neste caso \(dx = dy = dz = 0\) para o este observador. Como a separação em \(M_4\) é invariante temos, em comparação com um outro observador qualquer, temos que
$$
ds^2 = – c^2 d \tau^2 = – c^2 dt^2 + dx^2 + dy^2 + dz^2,
$$
ou seja,
$$
d \tau^2 = dt^2 – \frac{1}{c^2} \left( dx^2 – dy^2 – dz^2 \right) = \left(
1 – \frac{v^2}{c^2} \right) dt^2,
$$
onde foi feita a substituição
$$
v^2 = \left( \frac{dx}{dt} \right)^2 + \left( \frac{dy}{dt} \right)^2 +
\left( \frac{dz}{dt} \right)^2,
$$
sendo \(v\) a velocidade relativa entre os dois referenciais e, por conseguinte, a velocida da partícula estudada pelo observador não comóvel. Podemos ainda escrever
$$
d \tau = dt \sqrt{1 – \left( v / c \right)^2} = dt \sqrt{1 – \beta^2}
$$
e, como consequência
$$
\frac{dt}{d \tau} = \frac{1}{\sqrt{1 – \beta^2}} .
$$
O tempo próprio é um escalar
$$
d \tau^2 = \frac{- 1}{c^2} ds^2
$$
e portanto invariante sob mudanças de coordenadas que satisfazem as transformações de Lorentz. Por este motivo é um bom candidato a ser usado como parâmetro nas equações do movimento.
 A estrutura do espaço-tempo
A estrutura do espaço-tempo

 Já em 1489 os sinais \( + \mbox{ e } –\) aparecem em uma obra sobre aritmética comercial de João Widman d’Eger, publicada em Leipzig, Alemanha. Eles não se referiam, no entanto, às representações de soma e subtração, ou à números positivos ou negativos, mas a excessos e déficit em problemas sobre operações comerciais. Os símbolos para positivos e negativos só se difundiram na Inglaterra com o uso feito por Robert Recorde em 1557. Os mesmos sinais já eram usados anteriormente, como exemplifica o pintura destes sinais em barris para indicar se estavam ou não cheios. Os gregos antigos, como Diofanto, por exemplo, indicavam a soma por justaposição das parcelas, assim como ainda é feito no caso de frações, \(1^{1/2}\), por exemplo. Os algebristas italianos usavam a palavra latina plus, ou sua letra \(p\) inicial, para indicar a operação de soma.
Já em 1489 os sinais \( + \mbox{ e } –\) aparecem em uma obra sobre aritmética comercial de João Widman d’Eger, publicada em Leipzig, Alemanha. Eles não se referiam, no entanto, às representações de soma e subtração, ou à números positivos ou negativos, mas a excessos e déficit em problemas sobre operações comerciais. Os símbolos para positivos e negativos só se difundiram na Inglaterra com o uso feito por Robert Recorde em 1557. Os mesmos sinais já eram usados anteriormente, como exemplifica o pintura destes sinais em barris para indicar se estavam ou não cheios. Os gregos antigos, como Diofanto, por exemplo, indicavam a soma por justaposição das parcelas, assim como ainda é feito no caso de frações, \(1^{1/2}\), por exemplo. Os algebristas italianos usavam a palavra latina plus, ou sua letra \(p\) inicial, para indicar a operação de soma.
 O símbolo \(\infty\) para o infinito foi introduzido por John Wallis (1616-1703) em seu livro De sectionibus conicis (Sobre as seções cônicas, 1655 ). Wallis era um estudioso clássico com grande erudição e é possível que tenha se inspirado no sinal romano para o número 1000, escrito CD ou M. Também se cogita que ele tenha tido esta idéia a partir da última letra do alfabeto grego, o ômega grego minúsculo, \(\omega\), como uma metáfora para o limite superior, o fim.
O símbolo \(\infty\) para o infinito foi introduzido por John Wallis (1616-1703) em seu livro De sectionibus conicis (Sobre as seções cônicas, 1655 ). Wallis era um estudioso clássico com grande erudição e é possível que tenha se inspirado no sinal romano para o número 1000, escrito CD ou M. Também se cogita que ele tenha tido esta idéia a partir da última letra do alfabeto grego, o ômega grego minúsculo, \(\omega\), como uma metáfora para o limite superior, o fim.
 Para representar a integração Leibniz escrevia, no início de seu desenvolvimento, a palavra latina omnia (tudo) em frente à quantidade a ser integrada. Depois passou a escrever \(dx\) após a integração e, em carta de 1675 para Oldenburg, secretário da Royal Society, ele sugeriu o uso de \(\int\), uma degeneração de um S longo significando summa (soma). Em Quadratura curvarum, 1704, Newton usou uma pequena barra vertical \(\overline x\) para representar \(\int x dx\). Duas barras verticais paralelas, \(\overline {\overline x}\) indicava a integração dupla. Em outras ocasiões ele escrevia o termo a ser integrado dentro de um retângulo. As convenções de Newton, como se pode imaginar, davam margem a erros de interpretação e nunca se tornaram populares, nem mesmo entre seus seguidores diretos na Inglaterra.
Para representar a integração Leibniz escrevia, no início de seu desenvolvimento, a palavra latina omnia (tudo) em frente à quantidade a ser integrada. Depois passou a escrever \(dx\) após a integração e, em carta de 1675 para Oldenburg, secretário da Royal Society, ele sugeriu o uso de \(\int\), uma degeneração de um S longo significando summa (soma). Em Quadratura curvarum, 1704, Newton usou uma pequena barra vertical \(\overline x\) para representar \(\int x dx\). Duas barras verticais paralelas, \(\overline {\overline x}\) indicava a integração dupla. Em outras ocasiões ele escrevia o termo a ser integrado dentro de um retângulo. As convenções de Newton, como se pode imaginar, davam margem a erros de interpretação e nunca se tornaram populares, nem mesmo entre seus seguidores diretos na Inglaterra.
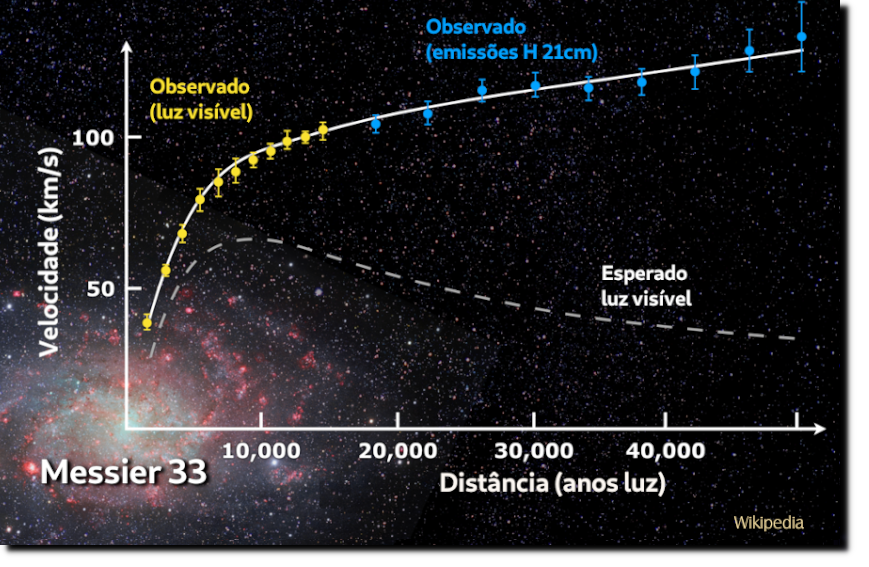
 Fritz Zwicky (1898 — 1974) foi um astrônomo suíço que trabalhou a maior parte de sua vida nos EUA. Zwicky foi o primeiro astrónomo a usar o teorema do virial para fazer inferências sobre a existência da não-observada matéria escura, descrevendo-a como dunkle Materie (dark matter ou matéria escura). Ele foi também o primeiro a observar estrelas super brilhantes, que ele denominou supernovas, que se formam quando as estrelas estão em sua fase final de evolução, depois de usar a maior parte de seu combustível nuclear. Supernovas são a fonte de grande parte dos raios cósmicos que chegam a Terra e marcam a transição entre estrelas comuns e as estrelas de neutrons. Zwicky propôs a existência das lentes gravitacionais, uma consequência da teoria da gravitação de Einstein.
Fritz Zwicky (1898 — 1974) foi um astrônomo suíço que trabalhou a maior parte de sua vida nos EUA. Zwicky foi o primeiro astrónomo a usar o teorema do virial para fazer inferências sobre a existência da não-observada matéria escura, descrevendo-a como dunkle Materie (dark matter ou matéria escura). Ele foi também o primeiro a observar estrelas super brilhantes, que ele denominou supernovas, que se formam quando as estrelas estão em sua fase final de evolução, depois de usar a maior parte de seu combustível nuclear. Supernovas são a fonte de grande parte dos raios cósmicos que chegam a Terra e marcam a transição entre estrelas comuns e as estrelas de neutrons. Zwicky propôs a existência das lentes gravitacionais, uma consequência da teoria da gravitação de Einstein.








 No campo das expectativas para um futuro muito próximo podemos mencionar as interfaces entre cérebro e computador mediadas por IAs, conectados à máquinas externas tais como exoesqueletos. Esses sistemas estarão disponíveis para pacientes com acidentes cérebro-vasculares, com traumas, doenças neurológicas, ou simplesmente como uma extensão de habilidades de uma pessoa saudável.
No campo das expectativas para um futuro muito próximo podemos mencionar as interfaces entre cérebro e computador mediadas por IAs, conectados à máquinas externas tais como exoesqueletos. Esses sistemas estarão disponíveis para pacientes com acidentes cérebro-vasculares, com traumas, doenças neurológicas, ou simplesmente como uma extensão de habilidades de uma pessoa saudável. Os problemas envolvendo a indústria da propaganda nos meios virtuais ficam exacerbados pelas práticas ilegais e imorais do roubo de dados. Dados se tornaram um produto valioso e a ausência de uma legislação atualizada estimula a prática da invasão de computadores e telefones pessoais e corporativos. Redes sociais importantes já foram flagradas vendendo informações sobre seus usuários que são usadas para o mero estímulo ao consumo ou para o atingimento de metas políticas muitas vezes obscuras e antidemocráticas.
Os problemas envolvendo a indústria da propaganda nos meios virtuais ficam exacerbados pelas práticas ilegais e imorais do roubo de dados. Dados se tornaram um produto valioso e a ausência de uma legislação atualizada estimula a prática da invasão de computadores e telefones pessoais e corporativos. Redes sociais importantes já foram flagradas vendendo informações sobre seus usuários que são usadas para o mero estímulo ao consumo ou para o atingimento de metas políticas muitas vezes obscuras e antidemocráticas.
 Um exemplo não óbvio da análise de séries temporais está nos aplicativos de reconhecimento de voz. Conversão direta de voz em texto ou vice-versa, de tradução ou de uso nos chamados assistentes pessoais, tais como o Alexa do Google e Siri da Apple são aplicações deste tecnologia. Através desses assistentes o usuário pode acionar outros aplicativos em seu aparelho pessoal, escolher músicas, enviar emails, entre outras funcionalidades.
Um exemplo não óbvio da análise de séries temporais está nos aplicativos de reconhecimento de voz. Conversão direta de voz em texto ou vice-versa, de tradução ou de uso nos chamados assistentes pessoais, tais como o Alexa do Google e Siri da Apple são aplicações deste tecnologia. Através desses assistentes o usuário pode acionar outros aplicativos em seu aparelho pessoal, escolher músicas, enviar emails, entre outras funcionalidades. As aplicações de máquinas inteligentes são particularmente animadoras no campo da saúde, em especial para diagnósticos por imagem. Doenças de pele ou dos olhos, ou células cancerosas podem ser detectadas por meio da análise de imagens, muitas vezes com precisão superior à obtida por um técnico humano. O estudo do registro médico pormenorizado de um paciente pode indicar tendências e sugerir formas viáveis de tratamento.
As aplicações de máquinas inteligentes são particularmente animadoras no campo da saúde, em especial para diagnósticos por imagem. Doenças de pele ou dos olhos, ou células cancerosas podem ser detectadas por meio da análise de imagens, muitas vezes com precisão superior à obtida por um técnico humano. O estudo do registro médico pormenorizado de um paciente pode indicar tendências e sugerir formas viáveis de tratamento.
 A Educação é um setor tradicionalmente refratário às novas tecnologias e as novidades demoram para entrar na sala de aula. Apesar disso muitas propostas envolvendo IA têm surgido, algumas delas já em aplicação.
A Educação é um setor tradicionalmente refratário às novas tecnologias e as novidades demoram para entrar na sala de aula. Apesar disso muitas propostas envolvendo IA têm surgido, algumas delas já em aplicação. É no campo puramente acadêmico, no entanto, que se pode esperar os melhores resultados. Sistemas inteligentes tem sido treinados para a personalização com ajuste super fino de ementas e fluxos de estudo para o indivíduo, levando em conta suas habilidades e deficiências. Com a adoção de textos eletrônicos a informação antes contida em grandes volumes de papel pode ser, de modo simples e de baixo custo, fragmentada em guias menores de estudos, contendo blocos lógicos completos com referência a recursos multimídia e conteúdo expandido. Sistemas de IA podem fornecer uma interface interativa capaz de responder perguntas ou indicar referências visando esclarecer pontos pouco compreendidos. Uma IA pode auxiliar o professor inclusive por meio de diálogos falados, resolvendo dúvidas e ajudando na solução de exercícios, enquanto a análise de imagens capturadas por câmeras pode indicar o nível de concentração ou dispersão dos estudantes.
É no campo puramente acadêmico, no entanto, que se pode esperar os melhores resultados. Sistemas inteligentes tem sido treinados para a personalização com ajuste super fino de ementas e fluxos de estudo para o indivíduo, levando em conta suas habilidades e deficiências. Com a adoção de textos eletrônicos a informação antes contida em grandes volumes de papel pode ser, de modo simples e de baixo custo, fragmentada em guias menores de estudos, contendo blocos lógicos completos com referência a recursos multimídia e conteúdo expandido. Sistemas de IA podem fornecer uma interface interativa capaz de responder perguntas ou indicar referências visando esclarecer pontos pouco compreendidos. Uma IA pode auxiliar o professor inclusive por meio de diálogos falados, resolvendo dúvidas e ajudando na solução de exercícios, enquanto a análise de imagens capturadas por câmeras pode indicar o nível de concentração ou dispersão dos estudantes. Associada ao uso da apresentação dinâmica de conteúdo um sistema treinado por IA e subsidiado por avaliações permanentes e automáticas de desempenho pode indicar o melhor roteiro, as necessárias revisões e ritmo do aprendizado. Tutores automáticos podem acompanhar e sugerir o ritmo de estudo de um estudante. A avaliação permanente, além de tornar desnecessária a temida temporada de provas, avaliará o nível atual de conhecimento do aluno, insistindo em exemplos e exercícios caso um conceito não esteja bem assimilado através da apresentação de questões com níveis crescentes de dificuldade, sugerindo o retorno para níveis mais básicos ou a progressão para tópicos mais avançados. Ele pode identificar lacunas no entendimento e apresentar as intervenções corretas para preencher essas deficiências.
Associada ao uso da apresentação dinâmica de conteúdo um sistema treinado por IA e subsidiado por avaliações permanentes e automáticas de desempenho pode indicar o melhor roteiro, as necessárias revisões e ritmo do aprendizado. Tutores automáticos podem acompanhar e sugerir o ritmo de estudo de um estudante. A avaliação permanente, além de tornar desnecessária a temida temporada de provas, avaliará o nível atual de conhecimento do aluno, insistindo em exemplos e exercícios caso um conceito não esteja bem assimilado através da apresentação de questões com níveis crescentes de dificuldade, sugerindo o retorno para níveis mais básicos ou a progressão para tópicos mais avançados. Ele pode identificar lacunas no entendimento e apresentar as intervenções corretas para preencher essas deficiências.







